









IMDEA Networks
Home

Welcome to the Pervasive Wireless Systems Group. The group is led by Dr. Domenico Giustiniano. The group investigates novel system solutions for the next generation of pervasive wireless systems. The main objective is to create impact, publishing in top system conferences, and transferring the results to the society. The current main areas of research are:
- Battery-free IoT Networks (including LiFi research, openvlc.org)
- Large-scale Spectrum Analytics
- 5G and Beyond Localization Systems
What’s new!
ENLIGHT’EM: weaving the future of wireless communications with sustainable innovation
The European project coordinated by Domenico Giustiniano has provided pioneering results to establish the foundation for the next generation of Internet of Things networks. The project has ended in December 2023 marking a major milestone: contributing to design a new generation of wireless systems based on visible light communication (VLC) and on the low power consumption of light-emitting diodes (commonly known as LEDs) for challenging Internet of Things (IoT) scenarios.

Javier Talavante wins second place in the Young Entrepreneurship Awards-Carné Joven de la Comunidad de Madrid with Sensory-FI
The spin-off, co-founded by Javier Talavante, Dayrene Frómeta, Borja Genovés and Domenico Giustiniano, has stood out not only for its technological innovation but also for its focus on environmental and social sustainability. This achievement in the Young Entrepreneurship-Young Carnet Awards reflects the positive impact that LiFi4Food can have on modern agriculture.

LiFi4Food, revolutionizing precision agriculture with IoT for sustainable and efficient farming
The Pervasive Wireless Systems PhD Students Dayrene Frómeta Fonseca and Javier Talavante, together with Dr. Borja Genovés Guzmán and Dr. Domenico Giustiniano gave life to a revolutionary solution that promises to completely transform the landscape of precision agriculture. LiFi4Food represents not only a technological milestone, but also a commitment to a sustainable future, where innovation and intelligence come together to boost efficiency in food production.
 ACM MobiCom 2023: Madrid becomes the epicenter of the technological revolution with a cutting-edge conference
ACM MobiCom 2023: Madrid becomes the epicenter of the technological revolution with a cutting-edge conference
Madrid hosted the twenty-ninth edition of the prestigious international ACM MobiCom 2023 conference, held at the Riu Plaza de España hotel from October 2-6, with IMDEA Networks as part of the event’s organizing committee, with Domenico Giustiniano, as the vice chair.
Team
Scientific Direction

Research
Research Engineering & Support
Admin
External PhD Students
Former Postdocs
Dr. Borja Genovés

PhD student and Postdoctoral Researcher
Current Position: MSCA Fellow at Virginia University, USA / UC3M, Spain.
Dr. Roberto Calvo

Postdoctoral Researcher
Current Position: Assistant Professor at URJC, Spain
Dr. Maurizio Rea

Postdoctoral Researcher
Current Position: Senior Researcher at i2cat, Spain.
Dr. Danilo de Donno

Postdoctoral Researcher
Current Position: Senior Wireless System Engineer at Huawei, Italy
Alumni
Roberto Calvo
PhD student
Current Position: Assistant Professor at URJC, Spain
Maurizio Rea
PhD student
Current Position: Project Manager at ICT consulting, Italy
Ander Galisteo
PhD student
Current Position: Dojo Five: The Embedded Experts. St. Paul, Minnesota. USA
Aymen Fakhreddine

PhD student
Current Position: Double affiliation – Senior Researcher at Technology Innovation Institute, Abu Dhabi, United Arab Emirates / University of Klagenfurt, Austria.
Qing Wang

PhD student
Current Position: Assistant Professor at TU Delft, Netherlands
Projects
6
6th SENSE (ELSA)
6G location and sensing-based analytics
Financed by: Ministry of Science and Innovation
M
MAP-6G
Machine Learning-based Privacy Preserving Analytics for 6G Mobile Networks
Financed by: Ministry of Economic Affairs and Digital Transformation, European Union NextGeneration-EU
R
RISC-6G
Reconfigurable Intelligent Surfaces and Low-power Technologies for Communication and Sensing in 6G Mobile Networks
Financed by: Ministry of Economic Affairs and Digital Transformation, European Union NextGeneration-EU
SOMIRO
Soft Milli-robots
Financed by: European Union H2020-ICT-2020-2 (Information and Communication Technology) Grant
Previous projects
ENLIGHT’EM
European Training Network in Low-energy Visible Light IoT Systems
ARMASUISSE - AerialSensing
AI-driven Activity Detection of Intruders from the Sky
TAPIR-CM
Advanced techniques to enhance the intelligence of 5G networks
Armasuisse-BigLocator
Big Data-based Positioning of Rogue Transmitters
CONTACT-CM
Contact Tracing with 5G and Beyond Networks
LOCUS
LOCalization and analytics on-demand embedded in the 5G ecosystem, for Ubiquitous vertical applicationS
PinPoint 5G+
Accurate, Pervasive and Low-Latency Positioning to Innovate 5G Networks and Beyond
Armasuisse -TecLoch
Technology Classification and Localization of Anomalies in the Spectrum
MYP-SOCRATES
Large Scale Collaborative Detection and Location of Threats in the Electromagnetic Space
Armasuisse - CompPos
Armasuisse - SPECTRUMCOP PROGRAM: LOCATE IT
Armasuisse - SPECTRUMCOP PROGRAM: SpecScale
Technologies for Collaborative Detection of Spectrum Anomalies
Armasuisse- SPECTRUMCOP PROGRAM: MONTEBIANCO
Technologies for Collaborative Detection of Spectrum Anomalies
Location-aware MAC scheduling in Mobile and Dense Networks
Location-aware MAC programming in dense and mobile networks
Armasuisse - SPECTRUMCOP PROGRAM: SPECTRUMCOP II
Technologies for Collaborative Detection of Spectrum Anomalies
Flex5Gware
Flexible and efficient hardware/software platforms for 5G network elements and devices
Armasuisse - SPECTRUMCOP PROGRAM: SPECTRUMCOP I
Technologies for Collaborative Detection of Spectrum Anomalies
Armasuisse - MATISSE
Pervasive Mobile Location and Spectrum Sensing Systems
WIRELESS NETWORK DEPLOYMENT AND Wi-Fi BASED INDOOR LOCALIZATION
OPPORTUNISTIC TIMING SIGNALS FOR PERVASIVE MOBILE LOCATION
SWARMIX
Synergistic Interactions in Swarms of Heterogeneous Agents
Publications
ORAN-Sense: Localizing Non-cooperative Transmitters with Spectrum Sensing and 5G O-RAN
Yago Lizarribar, Roberto Calvo-Palomino, Alessio Scalingi, Giuseppe Santaromita, Gerome Bovet, Domenico Giustiniano
IEEE International Conference on Computer Communications. Vancouver, Canada. May 2024
Det-RAN: Data-Driven Cross-Layer Real-Time Attack Detection in 5G Open RANs
Alessio Scalingi, Salvatore D'oro, Francesco Restuccia, Tommaso Melodia, Domenico Giustiniano
IEEE International Conference on Computer Communications. Vancouver, Canada. May 2024
Sustainable Spectrum Crowdsensing
Yijing Zeng, Bangya Liu, Yilong Li, Domenico Giustiniano, Suman Banerjee
IEEE International Symposium on Dynamic Spectrum Access Networks. Washington DC, USA. May 2024
A prediction-model-assisted reinforcement learning algorithm for handover decision-making in hybrid LiFi and WiFi networks
Dayrene Frómeta, Borja Genovés Guzmán, Giovanni Luca Mertena, Rui Bian, Harald Haas, Domenico Giustiniano
Journal of Optical Communications and Networking. 10.1364/JOCN.495234. January 2024
Modulating LiFi for dual operation in the visible and infrared spectra (Accepted for publication)
Dayrene Frómeta, Muhammad Sarmad Mir, Sergio Iglesias De Frutos, Borja Genovés Guzmán, Domenico Giustiniano
Elsevier Computer Communications. 10.1016/j.comcom.2024.01.005. Elsevier. January 2024
SPRING+: Smartphone Positioning from a Single WiFi Access Point (Accepted for publication)
Stavros Eleftherakis, Giuseppe Santaromita, Maurizio Rea, Xavier Costa-Perez, Domenico Giustiniano
IEEE Transactions on Mobile Computing. 10.1109/TMC.2024.3367241. IEEE. January 2024
LiFi for Low-Power and Long-Range RF Backscatter
Muhammad Sarmad Mir, Borja Genovés Guzmán, Ambuj Varshney, Domenico Giustiniano
IEEE Transactions on Networking. 10.1109/TNET.2023.3344316. December 2023
A System Architecture for Battery-free IoT Networks
Dayrene Frómeta, Borja Genovés Guzmán, Domenico Giustiniano, Joerg Widmer
IEEE International Conference on Network Protocols. Reykjavik, Iceland. October 2023
SkyPos: Real-world evaluation of self-positioning with aircraft signals for IoT devices
Yago Lizarribar, Domenico Giustiniano, Gerome Bovet, Vincent Lenders
Journal on Selected Areas in Communications (JSAC). 10.1109/JSAC.2023.3322829. IEEE. October 2023
Bringing millimeter wave technology to any IoT device
Mohammad Mazaheri, Rafael Ruiz, Domenico Giustiniano, Joerg Widmer, Omid Abari
ACM International Conference on Mobile Computing and Networking. Madrid, Spain. October 2023
- 1
- 2
- 3
- …
- 12
- arrow_forward_ios
Infrastructure
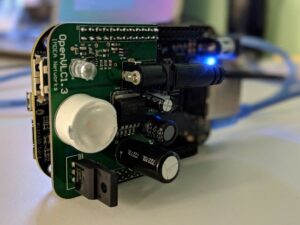
The group owns several USRP B210s and N310s, used for 5G localization, spectrum sensing and LiFi infrastructure. Training of deep learning algorithms for spectrum sensing are performed using 4xA100 GPUs with 6TB SSD SATA, GPU NVIDIA RTX2080Ti, NUC i5 and NUC i7 boards are used for several activities of the group, such as controlling outdoor spectrum sensors and LiFi infrastructure. The LiFi lab unit of the group includes several OpenVLC boards, it hosts different testbeds based on a large number of OpenVLC boards, moved through the OpenBuilds Acro Systems, and has the software and laboratory equipment to develop new versions and extensions of OpenVLC boards such as Agilent 3000 X-series oscilloscope. Finally, the group has an FPC1000 Spectrum Analyzer of Rohde&Schwarz that goes from 5kHz to 3GHz. It may be used by several projects in the group to analyze RF emissions at different bands.
Contact
- Group leader: Domenico Giustiniano
- Email: domenico.giustiniano@imdea.org
- Contact phone: +34 914 816 970
- Fax: 3491481696
Office & Postal Address
- IMDEA Networks Institute
- Avda. del Mar Mediterraneo, 22
- 28918 Leganes (Madrid)
- SPAIN